The process concept and IPC
The fundamentals of program execution, processes and inter process communication (IPC).
The fundamentals of program execution, processes and inter process communication (IPC).
Before you continue, you must clone the processes-and-ipc repository.
From the terminal, navigate to a directory where you want the cloned directory to be created and execute the following command.
git clone https://github.com/os-assignments/processes-and-ipc.gitNow you should see something similar to this in the terminal.
Cloning into 'processes-and-ipc'...
remote: Counting objects: 38, done.
remote: Compressing objects: 100% (26/26), done.
remote: Total 38 (delta 8), reused 38 (delta 8), pack-reused 0
Unpacking objects: 100% (38/38), done.
Checking connectivity... done.
Checking out files: 100% (32/32), done.To get an overview of the cloned repository, use the tree command.
tree processes-and-ipcNow you should see a tree view of all files and directories in the
processes-and-ipc directory.
processes-and-ipc
├── examples
│ ├── bin
│ ├── data
│ │ └── data.txt
│ ├── Makefile
│ ├── obj
│ └── src
│ ├── child.c
│ ├── execlp_ls.c
│ ├── execv_ls.c
│ ├── execvp_ls.c
│ ├── fork.c
│ ├── fork_exec.c
│ ├── fork_exit_wait.c
│ ├── fork_exit_wait_status.c
│ ├── fork-template.c
│ ├── fork_zombie.c
│ ├── ls_pipe_wc.c
│ ├── open_read.c
│ ├── perror.c
│ ├── pipe.c
│ └── random_mystery.c
├── higher-grade
│ ├── bin
│ ├── Makefile
│ ├── obj
│ └── src
│ ├── parser.c
│ ├── parser.h
│ └── shell.c
├── mandatory
│ ├── bin
│ ├── Makefile
│ ├── obj
│ └── src
│ ├── pipeline.c
│ └── signals.c
└── tools
├── monitor
└── my-ps
14 directories, 26 filesIf you run macOS and tree is not installed, use Homebrew to install tree.
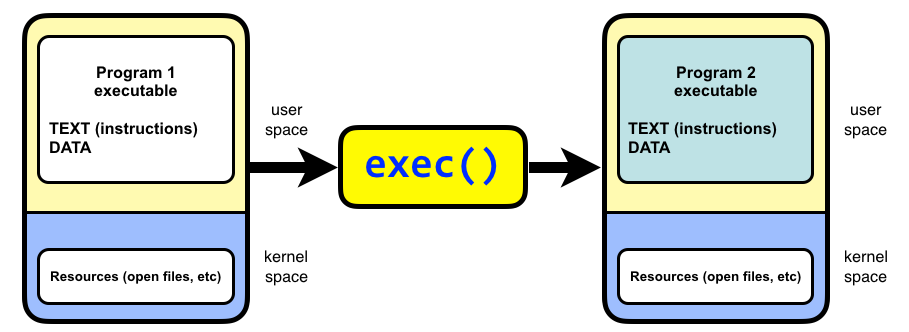
brew install treeThe exec family of system calls replaces the program executed by a process.
When a process calls exec, all code (text)
and data in the process is lost and replaced with the executable of the new program.
Although all data is replaced, all open file descriptors remains open after
calling exec unless explicitly set to close-on-exec.
In the below diagram a process is executing Program 1. The program calls exec
to replace the program executed by the process to Program 2.
The execlp system call duplicates the actions of the shell in searching
for an executable file if the specified file name does not contain a slash (/)
character. The search path is the path specified in the environment by the PATH
variable. If this variable isn’t specified, the default path ":/bin:/usr/bin"
is used.
The execlp system call can be used when the number of arguments to the new
program is known at compile time. If the number of arguments is not known at
compile time, use execvp.
#include <unistd.h>
int execlp(const char *file, const char *arg, ...);const char *arg and subsequent ellipses can be thought of as arg0, arg1, ..., argn. Together they describe a list of one or more pointers to
null-terminated strings that represent the argument list available to the
executed program. The first argument, by convention, should point to the
filename associated with the file being executed. The list of arguments must be
terminated by a NULL pointer.In processes-and-ipc/examples/src/execlp_ls.c you find the following example program
demonstrating how execv can be used.
#include <unistd.h> // execlp()
#include <stdio.h> // perror()
#include <stdlib.h> // EXIT_SUCCESS, EXIT_FAILURE
int main(void) {
execlp("ls", "ls", "-l", NULL);
perror("Return from execlp() not expected");
exit(EXIT_FAILURE);
}The program uses execlp to search the PATH for an executable file named ls
and passing
-l as argument to the new program. The new program is the same program used by
the shell command ls to list files in a directory.
Use make to compile:
makeRun the program.
./bin/execlp_lsYou should see something similar to this in the terminal.
-rw-r--r--@ 1 karl staff 410 Jan 27 21:16 Makefile
drwxr-xr-x 17 karl staff 578 Jan 28 22:08 bin
drwxr-xr-x 3 karl staff 102 Dec 1 2016 data
drwxr-xr-x 2 karl staff 68 Jan 28 22:08 obj
drwxr-xr-x 17 karl staff 578 Jan 28 22:08 srcThe execvp system call will duplicate the actions of the shell in searching
for an executable file if the specified file name does not contain a slash (/)
character. The search path is the path specified in the environment by the PATH
variable. If this variable isn’t specified, the default path ":/bin:/usr/bin"
is used. In addition, certain errors are treated specially.
#include <unistd.h>
int execvp(const char *file, char *const argv[]);In processes-and-ipc/examples/src/execvp_ls.c you find the following example program
demonstrating how execvp can be used.
#include <unistd.h> // execvp()
#include <stdio.h> // perror()
#include <stdlib.h> // EXIT_SUCCESS, EXIT_FAILURE
int main(void) {
char *const cmd[] = {"ls", "-l", NULL};
execvp(cmd[0], cmd);
perror("Return from execvp() not expected");
exit(EXIT_FAILURE);
}The program uses execvp to search the PATH for an executable file named ls
and passing
-l as argument to the new program. The new program is the same program used by
the shell command ls to list files in a directory. In comparison to using
execv we don’t have to provide the full path to ls when using execvp, only
the name of the executable.
Use make to compile:
makeRun the program.
./bin/execvp_lsYou should see something similar to this in the terminal.
total 8
-rw-r--r--@ 1 abcd1234 staff 410 Jan 27 21:16 Makefile
drwxr-xr-x 5 abcd1234 staff 170 Jan 27 21:17 bin
drwxr-xr-x 2 abcd1234 staff 68 Jan 27 21:17 obj
drwxr-xr-x 5 abcd1234 staff 170 Jan 27 21:16 srcIn comparison to execvp the execv system call doesn’t search the PATH.
Instead, the full path to the new executable must be specified. .
#include <unistd.h>
int execv(const char *path, char *const argv[]);argv argument is an array of character pointers
to null-terminated strings. The last member of this array must be a null
pointer. These strings constitute the argument list available to the new
process image. The value in argv[0] should point to the filename of the
executable for the new program.In processes-and-ipc/examples/src/execv_ls.c you find the following example program
demonstrating how execv can be used.
#include <unistd.h> // execv()
#include <stdio.h> // perror()
#include <stdlib.h> // EXIT_SUCCESS, EXIT_FAILURE
int main() {
char *const argv[] = {"/bin/ls", "-l", NULL};
execv(argv[0], argv);
perror("Return from execv() not expected");
exit(EXIT_FAILURE);
}The program uses execv to replace itself with the /bin/ls program passing
-l as argument to the new program. The new program is the same program used by
the shell command ls to list files in a directory.
Use make to compile:
makeRun the program.
./bin/execv_lsYou should see something similar to this in the terminal.
total 8
-rw-r--r--@ 1 abcd1234 staff 410 Jan 27 21:16 Makefile
drwxr-xr-x 5 abcd1234 staff 170 Jan 27 21:17 bin
drwxr-xr-x 2 abcd1234 staff 68 Jan 27 21:17 obj
drwxr-xr-x 5 abcd1234 staff 170 Jan 27 21:16 srcOne of the philosophies behind Unix is the motto do one thing and do it well. In this spirit, basic process management is done with a number of system calls, each with a single (simple) purpose. These system calls can then be combined to implement more complex behaviors.
The following system calls are used for basic process management.
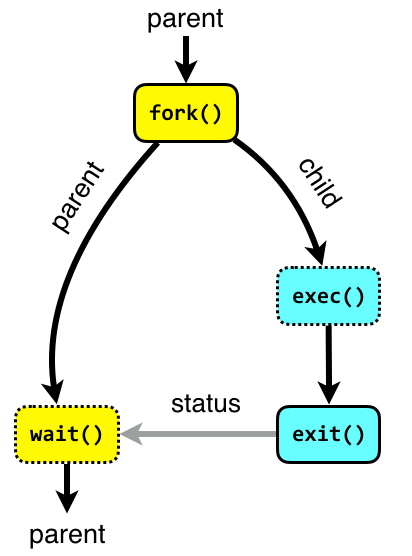
The process invoking fork is called the parent. The new process created as the
result of a fork is the child of the parent.
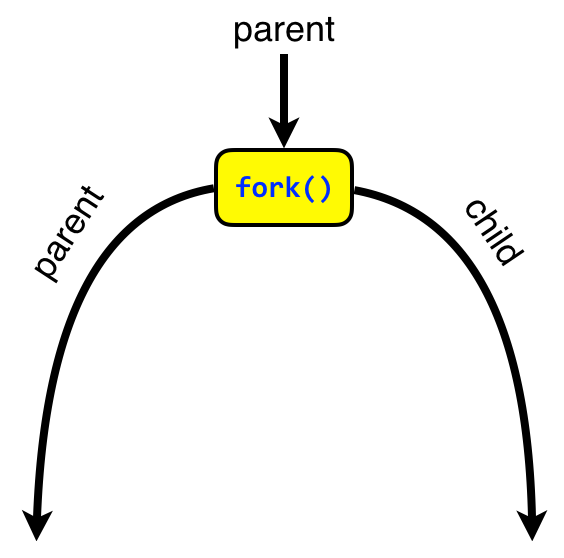
After a successful fork, the child process is a copy of the parent. The parent and child processes executes the same program but in separate processes.
The fork system call is the primary (and historically, only) method of process creation in
Unix-like operating systems.
#include <unistd.h>
pid_t fork(void);-1 is returned in the parent, no child
process is created, and errno is set appropriately.On success fork returns twice: once in the parent and once in the child. After
calling fork, the program can use the fork return value to tell whether
executing in the parent or child.
0 the program
executes in the new child process.fork returns -1.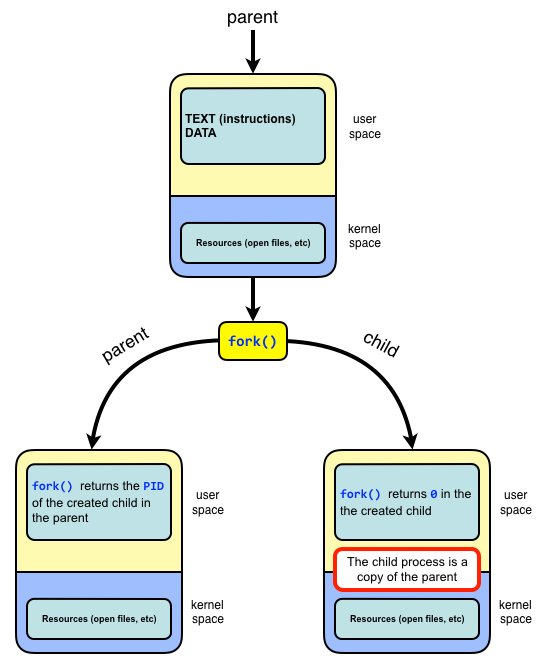
In the file examples/src/fork-template.c you find a template for a
typical program using fork.
1#include <stdio.h> // perror()
2#include <stdlib.h> // exit(), EXIT_SUCCESS, EXIT_FAILURE
3#include <unistd.h> // fork()
4
5int main(void) {
6
7 pid_t pid;
8
9 switch (pid = fork()) {
10
11 case -1:
12 // On error fork() returns -1.
13 perror("fork failed");
14 exit(EXIT_FAILURE);
15
16 case 0:
17 // On success fork() returns 0 in the child.
18
19 // Add code for the child process here.
20
21 exit(EXIT_SUCCESS);
22
23 default:
24 // On success fork() returns the pid of the child to the parent.
25
26 // Add code for the parent process here.
27
28 exit(EXIT_SUCCESS);
29 }
30}On lines 1-3 a number of header files are included to get access to a few functions and constants from the C Standard library.
One line 7 the variable pid of type pid_t is declared. The pid_t data
type is the data type used for process IDs.
On line 9 the parent process calls fork and stores the return value in the
variable pid.
On line 9 a switch-statement is used to check the return value of fork.
On failure fork returns -1 and execution continues in the case -1 branch
of the switch statement (line 11). The operating system was not able to create a
new process. The parent uses perror to print an error message (line 13) and
then terminates with exit status EXIT_FAILURE (line 14).
On success fork returns 0 in the new child process and execution continues
in the case 0 branch of the switch statement (line 16). Any code to be executed
only by the child is placed here (line 19). The child terminates with exit
status EXIT_SUCCESS (line 21).
If the value fork returned by fork was neither -1 (error) nor 0 (child), execution continues
in the parent process in the default branch of the switch statement (line 23). In this case, the value returned by fork
is the process ID (PID) of the newly created child process.
In the file examples/fork.c you find a program with the following
main function.
int main(void) {
pid_t pid;
switch (pid = fork()) {
case -1:
// On error fork() returns -1.
perror("fork failed");
exit(EXIT_FAILURE);
case 0:
// On success fork() returns 0 in the child.
child();
default:
// On success fork() returns the pid of the child to the parent.
parent(pid);
}
}The code for the child is in the function child and the code for the parent in
the function parent.
void child() {
printf(" CHILD <%ld> I'm alive! My PID is <%ld> and my parent got PID <%ld>.\n",
(long) getpid(), (long) getpid(), (long) getppid());
printf(" CHILD <%ld> Goodbye!\n",
(long) getpid());
exit(EXIT_SUCCESS);
}
void parent(pid_t pid) {
printf("PARENT <%ld> My PID is <%ld> and I spawned a child with PID <%ld>.\n",
(long) getpid(), (long) getpid(), (long) pid);
printf("PARENT <%ld> Goodbye!\n",
(long) getpid());
exit(EXIT_SUCCESS);
}Both parent and child prints two messages and then
terminates.
Navigate to the examples directory. Compile using make.
makeRun the program.
./bin/fork You should see output similar to this in the terminal.
PARENT <87628> Spawned a child with PID = 87629.
PARENT <87628> Goodbye.
CHILD <87629> I'm alive and my PPID = 1.
CHILD <87629> Goodbye.Run the program multiple times and look specifically at the PPID value
reported by the child. Sometimes the child reports PPID = 1 but
sometimes it is equal to the PID of the parent. Clearly the PID of the parent is
not 1? Why doesn’t report the “correct” PPID value all the time?
An orphan process is a process whose parent process has terminated, though it remains running itself. Any orphaned process will be immediately adopted by the special init system process with PID 1.
Both the parent process and the child process competes for the CPU with all other processes in the system. The operating systems decides which process to execute when and for how long. The process in the system execute concurrently.
In our example program:
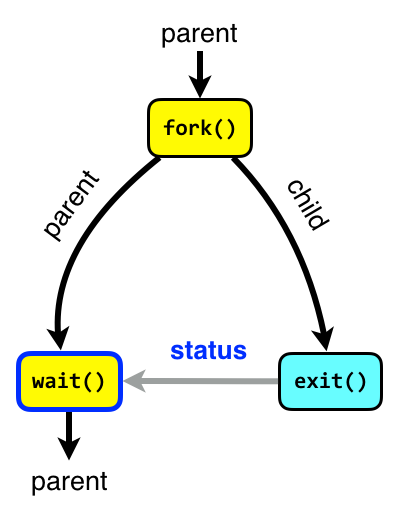
The wait system call blocks the caller until one of its child process
terminates. If the caller doesn’t have any child processes, wait returns
immediately without blocking the caller. Using wait the parent can obtain the
exit status of the terminated child.
#include <sys/types.h>
#include <sys/wait.h>
pid_t wait(int *status);
status is not NULL, wait store the exit status of the terminated child in the
int to which status points. This integer can be inspected using the
WIFEXITED and WEXITSTATUS macros.wait returns the PID of the terminated child. On failure (no
child), wait returns -1.#include <sys/types.h>
#include <sys/wait.h>
WIFEXITED(status);wait system call.exit or
by returning from main.#include <sys/types.h>
#include <sys/wait.h>
int WEXITSTATUS(status);wait system call.exit or
as the argument for a return statement in main. This macro should be employed
only if WIFEXITED returned true.In the examples/fork_exit_wait.c example program the parent execute
the parent function.
1void parent(pid_t pid) {
2
3 printf("PARENT <%ld> Spawned a child with PID = %ld.\n",
4 (long) getpid(), (long) pid);
5
6 wait(NULL);
7
8 printf("PARENT <%ld> Child with PID = %ld terminated.\n",
9 (long) getpid(), (long) pid);
10
11 printf("PARENT <%ld> Goodbye.\n",
12 (long) getpid());
13
14 exit(EXIT_SUCCESS);
15}On line 6 the parent calls wait(NULL) to wait for the
child process to terminate.
Compile and run the program. Now the parent should always wait for the child to terminate before terminating itself. As a consequence the child should:
In the examples/fork_exit_wait_status.c example program the parent execute
the parent function.
1void parent(pid_t pid) {
2 int status;
3
4 printf("PARENT <%ld> Spawned a child with PID = %ld.\n",
5 (long) getpid(), (long) pid);
6
7 wait(&status);
8
9 if (WIFEXITED(status)) {
10 printf("PARENT <%ld> Child with PID = %ld and exit status = %d terminated.\n",
11 (long) getpid(), (long) pid, WEXITSTATUS(status));
12 }
13
14 printf("PARENT <%ld> Goodbye.\n",
15 (long) getpid());
16
17 exit(EXIT_SUCCESS);
18}One line 2 the parent creates the variable status. On line 7 the parent calls
wait(&status) to wait for the child process to terminate. The & is the
address-of operator and &status returns the address of the status variable.
When the child terminates the exit status of the child will be stored in
variable status.
Compile using make.
make Run the program.
./bin/fork_exit_wait_statusIn the output you should be able to see that the parent obtained the exit status of the child.
PARENT <99340> Spawned a child with PID = 99341.
CHILD <99341> I'm alive and my PPID = 99340.
CHILD <99341> Goodbye, exit with status 42.
PARENT <99340> Child with PID = 99341 and exit status = 42 terminated.
PARENT <99340> Goodbye.A terminated process is said to be a zombie or defunct until the parent does
wait on the child.
wait and deletes the PCB.In the examples/fork_zombie.c example program the child terminates
before the parent does wait on the child and becomes a zombie process.
The parent execute
the parent function.
1void parent(pid_t pid) {
2
3 printf("PARENT <%ld> Spawned a child with PID = %ld.\n",
4 (long) getpid(), (long) pid);
5
6 printf("PARENT <%ld> Press any key to reap a zombie!\n",
7 (long) getpid());
8
9 getchar();
10
11 pid = wait(NULL);
12
13 printf("PARENT <%ld> Zombie child with PID = %ld",
14 (long) getpid(), (long) pid);
15
16 exit(EXIT_SUCCESS);
17}On line 9 the parent uses getchar to block itself until the user presses a key on the keyboard.
When the child terminates, the exit status of the child is stored in the
child process
control block (PCB). The operating system deallocates all memory used by the
child but the PCB cannot be deallocated until the parent does wait on the
child.
Compile using make.
make Run the program.
./bin/fork_zombieIn the output you should be able to see that the child terminates and that the parent blocks waiting for a keypress.
PARENT <4636> Spawned a child with PID = 4637.
PARENT <4636> Press any key to reap a zombie!
CHILD <4637> I'm alive and my PPID = 4636.
CHILD <4637> Goodbye.The child process has terminated but the parent has yet not read the exit status
of the child using wait. The child process has now become a zombie process.
On Unix-like systems, the top command produces an ordered list of running processes selected by user-specified criteria, and updates it periodically.
There are a few differences between the top command used by OS X and Linux. The
tools/monitor tools provides a simple but portable alternative for
monitoring processes with a specified command name.
Open a second terminal and navigate to the processes-and-ipc directory.
The tools/monitor tool can be used to view process status information
about process.
Use the --help flag to see the documentation.
./tools/monitor --helpThis is the built in documentation for the monitor tool.
Usage: monitor [-s delay] [-p pid] cmd
A top-like command that only lists USER, PID, STAT and COMM for the
current user and and processes with a command name with a grep match of cmd.
Options:
-s delay Delay in seconds between refresh, default = 1.
-p pid Include process with PID pid.
The cmd argument is the name of the program executed by the processes we want
to monitor.
Now let’s try and use the monitor tool to view process status information
for the parent and child, both executing the fork_zombie example program.
./tools/monitor fork_zombieOn Linux you should see something similar to this.
Monitoring processes matching: fork_zombie
Press Ctrl-C to exit
USER PID PPID S COMMAND
abcd1234 4636 4311 S fork_zombie
abcd1234 4637 4636 Z fork_zombie <defunct>In the PID column you see the PID of the listed processes. The first line shows
information about the parent and the second line shows information about the
child.
The S column show the status of the process.
S (sleep) meaning the process is waiting for an event
to complete. In this case the parent is blocked waiting for the call to
getchar() to return, i.e, the parent is blocked waiting for a key to be
pressed on the keyboard.Z (zombie) meaning the process terminated but not
yet reaped by its parent, i.e., the parent is alive but have not yet done
wait on the terminated child.Another name used for a zombie process is defunct.
From the terminal used to run the fork_zombie program, press any key to make the
parent do wait on the child.
PARENT <4636> Spawned a child with PID = 4637.
PARENT <4636> Press any key to reap a zombie!
CHILD <4637> I'm alive and my PPID = 4636.
CHILD <4637> Goodbye.
PARENT <4636> Zombie child with PID = 4637 reaped!
PARENT <4636> Press any key to terminate!In the terminal used to run monitor the zombie process should have disappear,
leaving only the parent process.
Monitoring processes matching: fork
Press Ctrl-C to exit
USER PID PPID S COMMAND
abcd1234 4636 4311 S fork_zombieThe parent is now blocked, waiting for user input.
From the terminal used to run the fork_zombie program, press any key to make the
parent terminate.
PARENT <4636> Spawned a child with PID = 4637.
PARENT <4636> Press any key to reap a zombie!
CHILD <4637> I'm alive and my PPID = 4636.
CHILD <4637> Goodbye.
PARENT <4636> Zombie child with PID = 4637 reaped!
PARENT <4636> Press any key to terminate!
PARENT <4636> Goodbye!If you don’t want to execute the same program in both the parent and the child,
you will need to use a system call of the exec family. The exec system calls
will replace the currently executing program with a new executable.
In examples/src/child.c you this small program.
#include <stdio.h> // puts(), printf(), perror(), getchar()
#include <stdlib.h> // exit(), EXIT_SUCCESS, EXIT_FAILURE
#include <unistd.h> // getpid(), getppid()
int main(void) {
printf(" CHILD <%ld> I'm alive and my PPID = %ld.\n",
(long) getpid(), (long) getppid());
printf(" CHILD <%ld> Press any key to make me terminate!\n",
(long) getpid());
getchar();
printf(" CHILD <%ld> Goodbye!\n",
(long) getpid());
exit(127);
}Compile using make.
make Run the program.
./bin/childFirst this program simply prints two messages to the terminal and then wait for a key-press.
CHILD <33172> I'm alive and my PPID = 81166.
CHILD <33172> Press any key to make me terminate!After you press any key in the terminal the program terminates.
CHILD <33172> I'm alive and my PPID = 81166.
CHILD <33172> Press any key to make me terminate!
CHILD <33172> Goodbye!The examples/src/fork_exec.c program uses execv to make the child process execute the examples/bin/child executable. After fork the child executes the child functions.
1void child() {
2 char *const argv[] = {"./bin/child", NULL};
3
4 printf(" CHILD <%ld> Press any key to make me call exec!\n",
5 (long) getpid());
6
7 getchar();
8
9 execv(argv[0], argv);
10
11 perror("execv");
12 exit(EXIT_FAILURE);
13}On line 2 the needed argument vector is constructed. On line 7 the child waits
for a key-press. After the key-press, on line 9, the child use execv to
replace the program executed by the child process by the child executable. If
execv is successful control will never be returned and lines 11 and 12 should
not be reached.
Compile using make.
make Run the program.
./bin/fork_execPARENT <33422> Spawned a child with PID = 33423.
CHILD <33423> Press any key to make me call exec!Open a second terminal and use the ps command with the -p option to see
information about the child process.
ps -p 33206
PID TTY TIME CMD
33423 ttys023 0:00.00 ./bin/fork_execNote that the child process currently is executing the .bin/fork_exec executable.
In the first terminal, press any key.
CHILD <33423> I'm alive and my PPID = 33422.
CHILD <33423> Press any key to make me terminate!From the other terminal and use the ps command with the -p option to see
information about the child process.
ps -p 33206
PID TTY TIME CMD
33423 ttys023 0:00.00 ./bin/childNote that the child process now executes the ./bin/child executable.
In the first terminal, press any key to make the child process terminate. Now the parent performs wait on the child and reports the child exit status.
CHILD <33423> Goodbye!
PARENT <33422> Child with PID = 33423 and exit status = 127 terminated.
PARENT <33422> Goodbye!Signals are a limited form of inter-process communication (IPC), typically used in Unix, Unix-like, and other POSIX-compliant operating systems. 1 A signal is used to notify a process of an synchronous or asynchronous event.
When a signal is sent, the operating system interrupts the target process' normal flow of execution to deliver the signal. If the process has previously registered a signal handler, that routine is executed. Otherwise, the default signal handler is executed. 1
Each signal is represented by an integer value. Instead of using the numeric values directly, the named constants defined in signals.h should be used.
If you haven’t done so already, you must clone the processes-and-ipc repository.
Open the file mandatory/src/signals.c in
the source code editor of your choice.
Study the C source code.
First a number of header files are included to get access to a few functions and constants from the C Standard library.
A global variable done is initialized to false.
bool done = false;Later this variable is going to be updated by a signal handler.
The divide_by_zero function attempts to divide by zero.
The function segfault attempts to dereference a NULL pointer
causing a segmentation fault.
The signal_handler function will handle signals sent to
the process. A switch statement is used to determine which
signal has been received. An alternative is to use one signal handling function for each signal
but here a single signal handling function is used.
All C programs starts to execute in the main function.
I'm done! on a separate line
to the terminal.EXIT_SUCCESS defined in stdlib.h.Let’s repeat the differences between a program, an executable and a process.
The make build tool is used together with the Makefile to compile all programs in
the mandatory/src directory.
From a terminal, navigate to the mandatory directory. To compile all
programs, type make and press enter.
makeWhen compiling, make places all executables in the bin directory.
Run the signals program.
./bin/signalsYou should now see output similar to this in the terminal.
My PID = 81430
I'm done!Note that the PID value you see will be different.
Run the program a few times. Note that each time you run the same program the process used to execute the program gets a new process ID (PID).
In C, // is used to start a comment reaching to the end of the line.
To make the program divide by zero, uncomment the following line.
// divide_by_zero();
Compile with make.
makeRun the program.
./bin/signalsIn the terminal you should see something similar to this.
My PID = 81836
[2] 81836 floating point exception ./bin/signalsDivision by zero causes an exception. When the OS handles the exception it sends
the SIGFPE (fatal arithmetic error) signal to the process executing the division by zero. The default
handler for the SIGFPE signal terminates the process and this is exactly
what happened here.
On some versions of Mac hardware, integer division by zero does not cause a
SIGFPE signal to be sent, instead a SIGILL (illegal instruction) signal
is sent. On other combinations of Mac hardware and C compiler, some other
signal might be sent, or no signal is sent at all.
If you run on Mac hardware and the process does not terminate when dividing by zero, you can:
SIGILL signal instead of the
SIGFPE signalRead more:
Run the program a few times. Each time you run the program the same error
(division by zero) happens, causing an exception, causing the OS to send the
process the SIGFPE signal, causing the process to terminate.
Synchronous signals are delivered to the same process that performed the operation that caused the
signal. Division by zero makes the OS send the process the synchronous signal
SIGFPE.
A program can install a signal handler using the signal function.
signal(sig, handler);Uncomment the following line to install the signal_handler function as the
signal handler for the SIGFPE signal.
// signal(SIGFPE, signal_handler);
Compile with make.
makeRun the program.
./bin/signalsIn the terminal you should see something similar to this.
My PID = 81979
Caught SIGFPE: arithmetic exception, such as divide by zero.This time the signal doesn’t terminate the process immediately. When the process
receives the SIGFPE signal the function signal_handler is executed with the
signal number as argument. After printing a message to the terminal the signal
handler terminates the process with status EXIT_FAILURE.
Comment out the following line.
divide_by_zero();Compile and run the program Make sure you see output similar to this in the terminal.
My PID = 82040
I'm done!A segmentation fault (aka segfault) are caused by a program trying to read or write an illegal memory location. To make the program cause a segfault, uncomment the following line.
// segfault();
Compile with make.
makeRun the program.
./bin/signalsIn the terminal you should see something similar to this.
My PID = 82084
[2] 82084 segmentation fault ./bin/signalsThe illegal memory access causes an exception. When the OS handles the exception it sends
the SIGSEGV signal to the process executing the illegal memory access. The default
handler for the SIGSEGV signal terminates the process and this is exactly
what happened here.
Run the program a few times. Each time you run the program the same error
(illegal memory access) happen, causing an exception, causing the OS to send the
process the SIGSEGV signal, causing the process to terminate.
Synchronous signals are delivered to the same process that performed the operation that caused the
signal. An illegal memory access makes the OS send the process the synchronous signal
SIGSEGV.
Add code to install the function signal_handler as the signal handler for the
SIGSEGV signal.
When you run the program you should output similar to this in the terminal.
My PID = 82161
Caught SIGSEGV: segfault.Comment out the following line.
segfault();Compile and run the program Make sure you see output similar to this in the terminal.
My PID = 82040
I'm done!The pause function is used to block a process until it receives a signal (any
signal will do).
Uncomment the following line.
// pause();
Compile and run the program. You should see output similar to this in the terminal.
My PID = 82249The process is now blocked, waiting for any signal to be sent to the process.
To terminate the process, press Ctrl+C in the terminal.
My PID = 82249
^CNote that once the process terminates you get the terminal prompt back.
Asynchronous signals are generated by an event external to a running process.
Pressing Ctrl+C is an external event causing the OS to send the asynchronous SIGINT
(terminal interrupt) signal to the process.
The default signal SIGINT handler terminates the process.
Add code to install the function signal_handler as the signal handler for the
SIGINT signal.
When you run the program the process blocks waiting for any signal. When you
press Ctrl+C you should now see output similar to this in the terminal.
My PID = 82477
^CCaught SIGINT: interactive attention signal, probably a ctrl+c.
I'm done!Open a second terminal.
Compile and run the program in one of the terminals. The program should block waiting for any signal. Note the PID of the blocked process.
My PID = 82629The command kill can be used to send signals to processes from the terminal.
To send the SIGINT signal to the blocked process, execute the following command in
the terminal where you replace <PID> with the PID of the blocked process.
kill -s INT <PID>In the other terminal you should now see the blocked process execute the signal
handler, then continue in main after pause(), print I'm done! and terminate.
My PID = 82629
Caught SIGINT: interactive attention signal, probably a ctrl+c.
I'm done!Add code to make the program print “Hello!” when receiving the SIGUSR1 signal.
SIGUSR1 signal to the process from the other terminal using the
kill command where you replace <PID> with the PID of the blocked process.kill -s SIGUSR1 <PID>How can you make the program print Hello! every time the signal SIGUSR1 is
received without terminating?
In the signal_hanlder function, set the global variable done to true when handling the
SIGINT signal.
In main, replace the line:
pause();, with the following while loop:
while (!done);In C ! is the logical not operator. This while loop repeatedly checks the global
variable done until it becomes true.
Compile and run the program from one terminal and send signals to the process from the other terminal.
SIGUSR1 signals to the process?while loop and terminate the process by sending the signal SIGINT to the
process, or by pressing Ctrl+C from the terminal?Depending on your compiler the program may not break out of the while(!done) loop
An optimizing compiler may detect that the variable done is not changed in the
while(!done); loop and replace the loop with if (!false);.
Do you remember the volatile keyword?
The volatile keyword is used to make sure that the contents of a variable
is always read from memory.
Make the global variable done volatile.
Compile and run the program from one terminal and send signals to the process from the other terminal.
SIGUSR1 signals to the process.SIGINT to the
process, or by pressing Ctrl+C from the terminal.The data type sig_atomic_t guarantees that reading and writing a variable happen in a single
instruction, so there’s no way for a signal handler to run “in the middle” of an
access. In general, you should always make any global variables changed by a
signal handler be of the data type sig_atomic_t.
Change the datatype of the global variable done from bool to sig_atomic_t.
Using a while loop to repeatedly check the global variable done is not a
very efficient use of the CPU. A better way is to change the loop to:
while (pause()) {
if (done) break;
};Why is this more efficient?
Here are a few examples of questions that you should be able to answer, discuss and relate to the source code of you solution during the code grading.
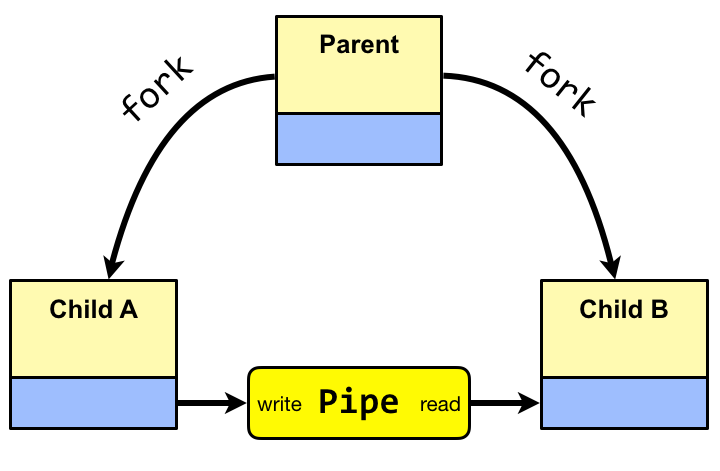
Your task is to create a system with one parent process and two child processes where the children communicate using a pipe.
Open a terminal and navigate to the mandatory directory.
The ls shell command list directory content. Execute the ls command in the
terminal.
lsYou should now see this:
Makefile bin obj srcThe -F option appends a slash / to directory entries.
ls -FThe only file in the directory is Makefile. The directory contains the
subdirectories bin, obj and src.
Makefile bin/ obj/ src/Add the -1 option to:
ls -F -1, print each entry on a separate line:
Makefile
bin/
obj/
src/The nl shell command is a filter that reads lines from stdin and echoes each
line prefixed with a line number to stdout. In the terminal, type nl and press
enter.
nlThe nl command now waits for stdin input. Type Some text and press enter.
Some text
1 Some textType More text and press enter.
More text
2 More textFor each line you type, the line is echoed back with a line number. Play around
some more with the nl command. Press Ctrl+D (End Of File) to make the nl
command exit.
One of the philosophies behind Unix is the motto do one thing and do it well. In this spirit, each shell command usually have a very specific purpose. More complicated commands can be constructed by combining simpler commands in a pipeline such that the output of one command becomes the input to another command.
The standard shell syntax for
pipelines is to list multiple commands, separated by vertical bars | (the pipe
character). In the below example the output from the ls -F -1
command is piped to input of the nl command.
ls -F -1 | nlNow the result of ls -F -1 is printed with line numbers added at the front of each line.
1 Makefile
2 bin/
3 obj/
4 src/All shell commands are ordinary programs. When the shell executes a command, the shell first forks a new process and uses exec to make the new process execute the command program.
The which utility locates a program executable in the user’s PATH. Use which to
see which program executables the shell uses for the ls and nl commands.
which lsThe executables for the ls command program is found in the /bin directory.
/bin/lsWhat about the nl command?
which nlThe executables for the nl command programs is also located in the
/bin directory.
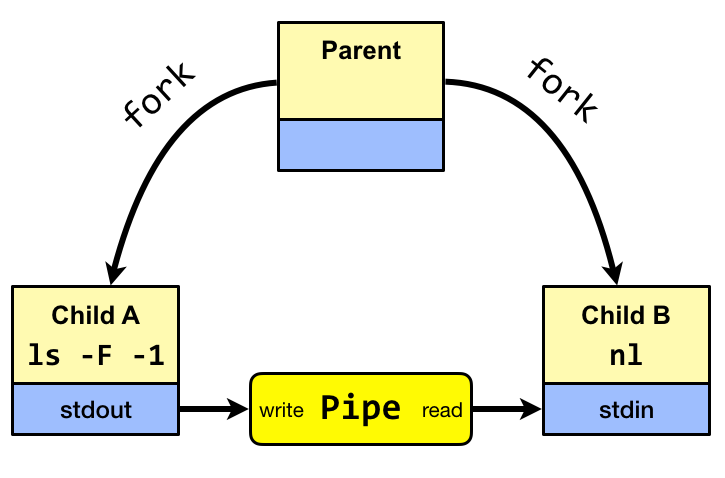
/bin/nlYour task is to create a program that mimics the ls -F -1 | nl pipeline. The
parent process uses fork to create two child processes. Child A uses exec
to execute the ls -F -1 command and Child B uses exec to execute the
nl command. The children uses a pipe to communicate. The stdout of Child A is
redirected to the write end of the pipe. The stdin of the Child B is redirected
to the read end of the pipe.
How can you make the child process share a pipe? Which process should create the pipe? When should the pipe be created?
The parent must use fork twice, once for each child process.
The parent should use wait twice to wait for both child processes to
terminate.
The child process should use execlp to execute their commands.
The child process should use dup2 to redirect stdout and stdin.
Don’t forget to close unused pipe file descriptors, otherwise a reader or writer might be blocked .
| Attempt | Conditions | Result |
|---|---|---|
| Read | Empty pipe, writers attached | Reader blocked |
| Read | Empty pipe, no writer attached | End Of File (EOF) returned |
| Write | Full pipe, readers attached | Writer blocked |
| Write | No readers attached | SIGPIPE |
Closing a read descriptor to early may cause a SIGPIPE.
The default SIGPIPE signal handler causes the process to terminate.
You should check the return values of all system calls to detect errors. On error use
perror to print an error message and then terminate with exit(EXIT_FAILURE).
Use the file src/pipeline.c to implement your solution.
main function. You must add code here.child_a function. You must add code here.child_b function. You must add code here.Use make to compile.
makeRun the program.
./bin/pipelineWhen running the finished program you should see output similar to this, where
$ is your shell prompt.
$ ./bin/pipeline
1 Makefile
2 bin/
3 obj/
4 src/
$Make sure you get the shell prompt $ back.
Here are a few examples of general questions not directly related to the source code that you should be able to answer and discuss during the code grading.
Here are a few examples of questions that you should be able to answer, discuss and relate to the source code of you solution during the code grading.
A shell is an interface between a user and the operating system. It lets us give commands to the system and start other programs. Your task is to program a simple shell similar to for example Bash, which probably is the command shell you normally use when you use a Unix/Linux system.
When programming a shell, several of the POSIX system calls you studied already
will be useful. Before you continue, make sure you have a basic understanding of
at least the following system calls: fork(), execvp(), getpid(), getppid(),
wait(), pipe(), dup2() and close().
In the higher-grade/src directory you find the following files.
Navigate to the higher-grade directory. Use make to compile.
makeRun the shell.
./bin/shellThe provided version of the shell uses >>> as the prompt and is able to execute single commands, for
example ls.
>>> ls
>>> Makefile bin obj srcNote that something is wrong with the shell prompt >>> . When executing a
command, the prompt is printed immediately after the command, and not after the
command has completed. This is something you need to fix.
Let’s try to pipe two commands together.
>>> ls | nl
>>> Makefile bin obj srcWhen trying to pipe two commands together, only the first command is executed. The second command is not executed. The output of the first command in not piped to as input to the second command. This is something you need to fix.
For 1 point your shell must be able to handle a single command and a pipeline
with two commands. When executing a command line, the prompt >>> must be
printed after the execution of the command line has finished.
For 3 points, in addition to the 1 point requirements above, the shell must be able to handle a pipeline with two, three or more commands.
You must also make sure that after a command line has finished, all descriptor to created pipes are closed. Otherwise the operating system will not be able to deallocate the pipes and potentially re-use the descriptor values.
In the file parser.h the following C structure is defined.
/**
* Structure holding all data for a single command in a command pipeline.
*/
typedef struct {
char* argv[MAX_ARGV]; // Argument vector.
position_t pos; // Position within the pipeline (single, first, middle or last).
int in; // Input file descriptor.
int out; // Output file descriptor.
} cmd_t;The above structure is used to hold data for a single command in a command pipe line.
In the file shell.c command data for all commands in
a command pipeline is stored in a global array.
/**
* For simplicitiy we use a global array to store data of each command in a
* command pipeline .
*/
cmd_t commands[MAX_COMMANDS];In parser.h you find the following prototype.
/**
* parses the string str and populates the commands array with data for each
* command.
*/
int parse_commands(char *str, cmd_t* commands);This function parse a command line string str such as "ls -l -F | nl" and populates the commands array with command data.
The below figure shows the overall structure of the shell.
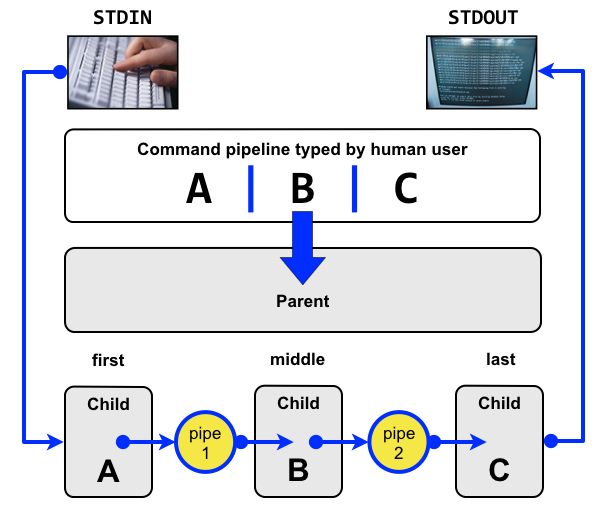
When a user types a command line on the form A | B | C the parent parses the
user input and creates one child process for each of the commands in the
pipeline. The child processes communicates using pipes. Child A redirects stdout
to the write end of pipe 1. Child B redirects stdin to the read end of pipe 1
and stdout to the write end of pipe 2. Child C redirects stdin to the read end
of pipe 2.
In the parser.c file you must complete the
implementation of the following function.
/**
* n - number of commands.
* i - index of a command (the first command has index 0).
*
* Returns the position (single, first, middle or last) of the command at index
* i.
*/
position_t cmd_position(int i, int n) {Use shell.c to implement your solution. This file
already implements the most basic functionality but it is far from complete.
When implementing your solution, you are allowed to:
The provided code is based on a design where the shell (parent) process creates one child process for each command in the pipeline.
An alternative design is for the first child process to create the second child, the second child to create the third child etc. If you prefer this design, this might require you to modify the provided source code to fit this alternative design.