Multiprogramming and custom system calls in Mips
Optional assignment for higher grade (3 points)
The Mars built-in system calls
Previously you have used a number
of system calls built in to MARS, for example to print
strings and integers. Before calling any of the Mars built-in system calls, the system call code is placed
in $v0. Next, the syscall instruction is used to invoke the system call.
In a real Mips system, the syscall instruction triggers a system call
exception (exception code 8) that causes control to be transferred from user
space to kernel space where the system call is handled. The kernel investigates
the value in $v0 to determine which specific system call the user requested.
In Mars the built-in system calls are handled by the simulator and not by the
kernel (exception and interrupt handler) code that you can study and modify. Unfortunately
this makes it impossible to provide custom implementations of system calls using
the syscall instruction.
No more magic
After all, this is a course about operating systems and we cannot be satisfied with the magic provided by the system calls built in to Mars. It is now time to implement our own custom system calls from scratch.
Timer interrupts
Unfortunately, Mars does not support timer interrupts. This makes it impossible for the kernel to to use a timer to swap between running jobs at regular intervals.
Multiprogramming
For the higher grade assignment you should implement a simplified version of multiprogramming.
System overview
An overview of the system is shown in the below figure.
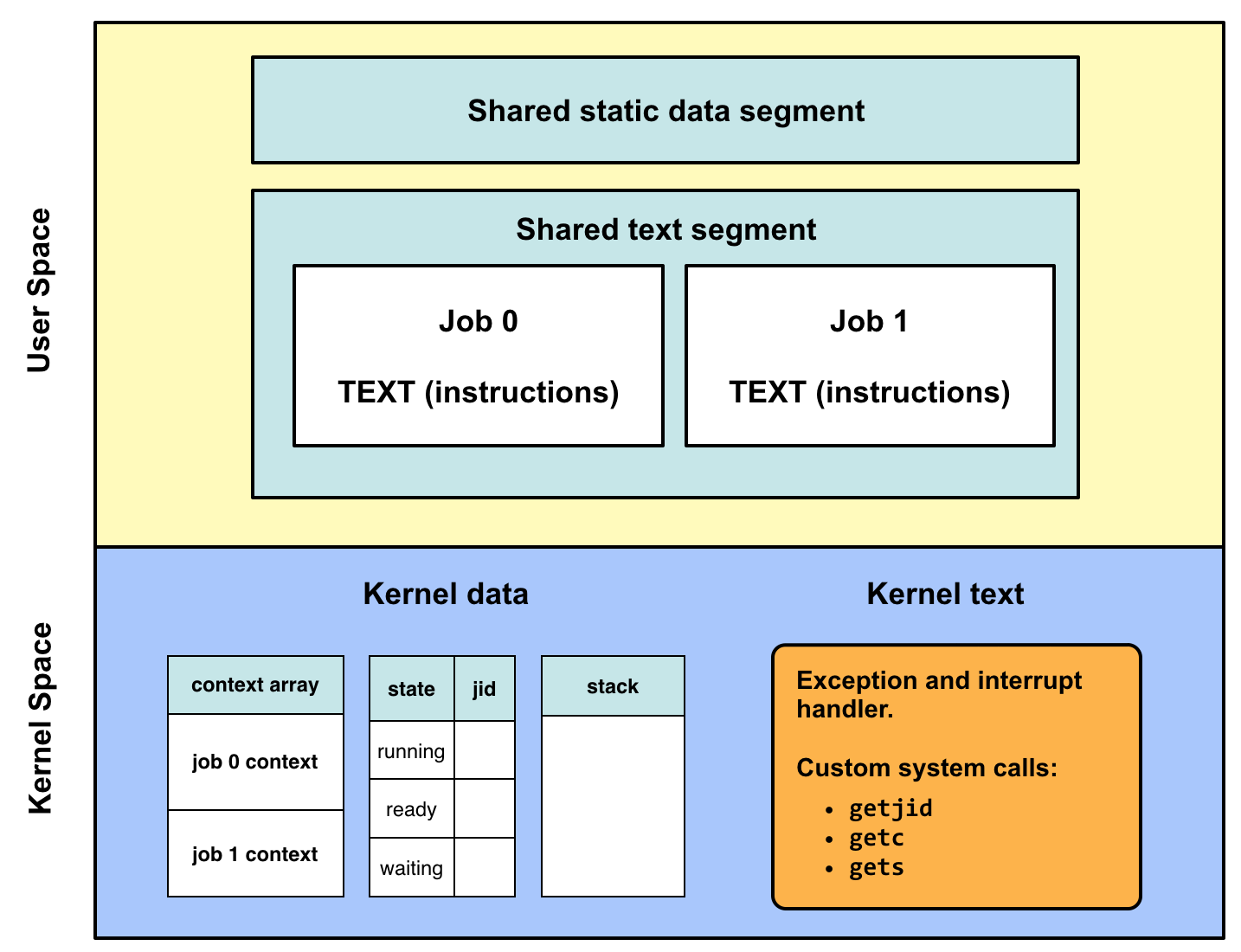
For simplicity there will be exactly two jobs in the system. The kernel will implement three custom system calls: getjid, getc and
gets. The kernel will use multiprogramming to switch job only when a job
requests I/O using the getc or gets system call.
Two non-terminating jobs
To make the system as simple as possible, the kernel only need to support two non-terminating jobs. Only one job can execute on the CPU at the time.
Job id (jid)
The two jobs are identified by job id (jid) numbers 0 and 1 respectively.
No stack and no subroutines
To keep the system simple the jobs cannot use the stack nor can they make subroutine calls.
No memory protection
Mars does not support any form of memory protection. As a consequence there will be no memory protection between user space and kernel, nor will there be any memory protection between jobs. Thetwo jobs:
- execute in the same memory space
- share the same data segment.
Only one job can request I/O
The whole purpose of multiprogramming is to maximize the usage of the CPU. A job executes on the CPU until requesting I/O. When requesting I/O the job is blocked waiting for the I/O request to complete. While waiting the other job executes on the CPU.
In this simplified system, only one of the two non-terminating jobs can request I/O. While a job is waiting for the I/O request to complete the other job executes on the CPU.
States
At any time, each of the two non-terminating jobs job can be in one of the following three states.
- Running
- The job is selected to execute on the CPU.
- Ready
- The job is not selected to execute on the CPU but ready to do so if selected.
- Waiting
- The job has made a request for I/O using either
getcorgetsand s blocked from executing until the the request have been completed.
On startup of the system (boot) one job is selected to execute (running) and the other is marked as ready to run.
State transitions
In this simplified version of a a multiprogramming system with only two jobs, the following state transitions are possible.
| From | To | Description |
|---|---|---|
| Running | Waiting | When the running job requests I/O, the job changes state from running to waiting. |
| Running | Ready | When an I/O requests completes, the running job changes state from running to ready. |
| Waiting | Running | When an I/O requests completes, the job waiting for the request to complete changes state from waiting to running. |
In the below diagram a sequence of five events shows how the two jobs change states.
![]()
![]()
Kernel
In this system the kernel is responsible for handling all exceptions and interrupts. The kernel will also be responsible for managing the execution of the two jobs.
Kernel stack
In order for the kernel to be able to use subroutines, the the kernel will allocate a stack.
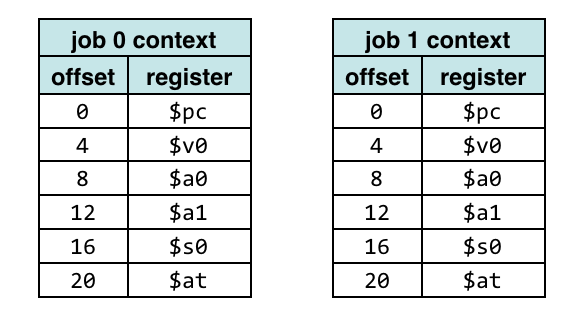
Job context
When a job executes it uses the CPU registers. At any time, the values of all the registers is called the context of the running job.
In this simplified system each job is only allowed to use the following six
registers: $pc (program counter), $v0, $a0, $a1, $s0 and $at (should only
be used by pseudo instructions).
Each register is four byte, hence 6*4 = 24 bytes of storage is needed to store the context. The contents of the registers are saved in the following order in each job context.
Addressing the context
If the address to a context is in register $t0, the address to each of the
fields in the context is shown in the column Assembly notation in the
following table.
| Field | Offset | Address | Assembly notation |
|---|---|---|---|
$pc | 0 | $t0 + 0 | 0($t0) |
$v0 | 4 | $t0 + 4 | 4($t0) |
$a0 | 8 | $t0 + 8 | 8($t0) |
$a1 | 12 | $t0 + 12 | 12($t0) |
$s0 | 16 | $t0 + 16 | 16($t0) |
Examples
In the following examples, the address to a context is in register $t0.
sw $t1, 8($t0) # Store $t1 to the $a0 field in the context.
lw $t2, 16($t0) # Load the $s0 field from the context into $t2. Context array
To store the contexts of the two jobs, a two element array is used. The array is indexed by job id (0 or 1). Each element of the array is a pointer to storage allocated for the context.
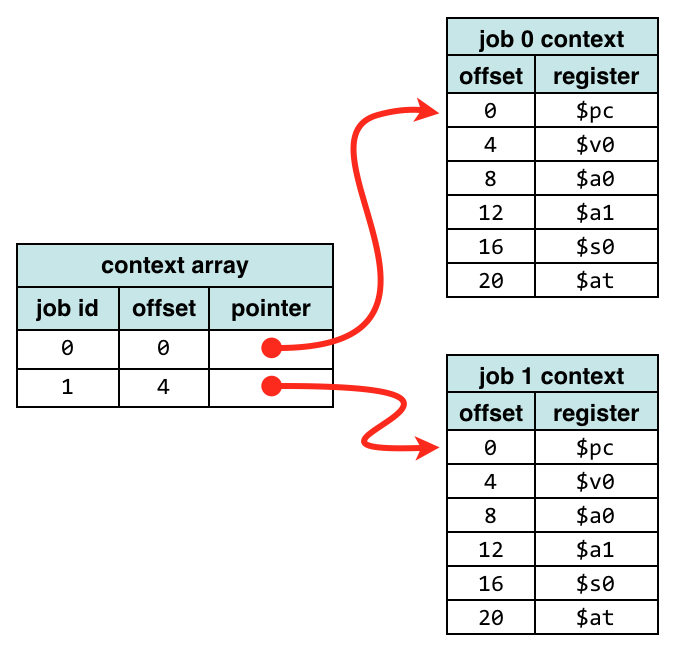
Addressing the context array
The two element context array is indexed by job id (0 or 1). Each element of
the context array is a pointer to a job context, i.e., a four byte address to a
job context.
If ca is the address of the context array and jid the job id, the following table shows
how to calculate the address to the context pointer the job with id jid.
Job id (jid) | Offset to context pointer | Address of context pointer |
|---|---|---|
0 | 0 == jid * 4 | ca + jid * 4 |
1 | 4 == jid * 4 | ca + jid * 4 |
Example
Multiplying with 4 is equivalent to shift left two bits. In Mips assembly the
sll (Shif Left Logical) instruction is used to bit shift to the left.
If the context array is stored at label __context_array and the job id (jid)
the of the running job is stored at label __running the following example shows how to
get the address to the context of the running job.
# Get job id (jid) of the running job.
lw $t0, __running
# Offset to context pointer (0 or 4) = jid * 4.
sll $t1, $t0, 2 # jid * 4
# Pointer to context.
lw $t3, __context_array($t1)Now $3 contains the address of the running jobs context and can be used to
access fields within the context as described in the
section addressing the context.
Save context
When entering the kernel, the context of the running job must be saved. i.e., the
contents of $pc, $v0, $a0, $a1, $s0 and $at must be saved to memory.
Restore context
When the kernel resume the execution of a job, the job context is first
restored, i.e., the values of $pc, $v0, $a0, $a1, $s0 and $at that
previously been saved to memory are read from memory and restored.
Custom system calls
The kernel will implement the following system calls.
| System call code | Name | Description | Arguments | Return value |
|---|---|---|---|---|
0 | getjid | Get job id of the caller | $a0 - job id of the caller | |
12 | getc | Read a single character from the keyboard | $v0 - ASCII code of pressed key | |
8 | gets | Read a string of characters from the keyboard | $a0 = buffer, $a1 = buffer size |
The teqi instruction
The teqi (Trap EQual Immediate) instruction is used to conditionally trigger a
trap exception (exception code 13) that automatically transfers control to the kernel.
teqi rs, immThe teqi instruction will cause a trap exception (exception code 13) if the value in
register rs is equal to the immediate constant imm.
**Example usage: **To trigger a trap exception we can compare $zero (allways
zero) with zero.
teqi $zero, 0Instead of using the syscall instruction we use teqi $zero, 0 when we
want to perform one of the custom system calls.
Calling the custom getjid system call
An example showing how to use the custom getjid system call to get the job id
of the caller:
li $v0, 0
teqi $zero, 0
# On success $a0 will now contain the job id (jid) of the caller. The below figure shows an example where job 1 calls the custom getjid
system call.
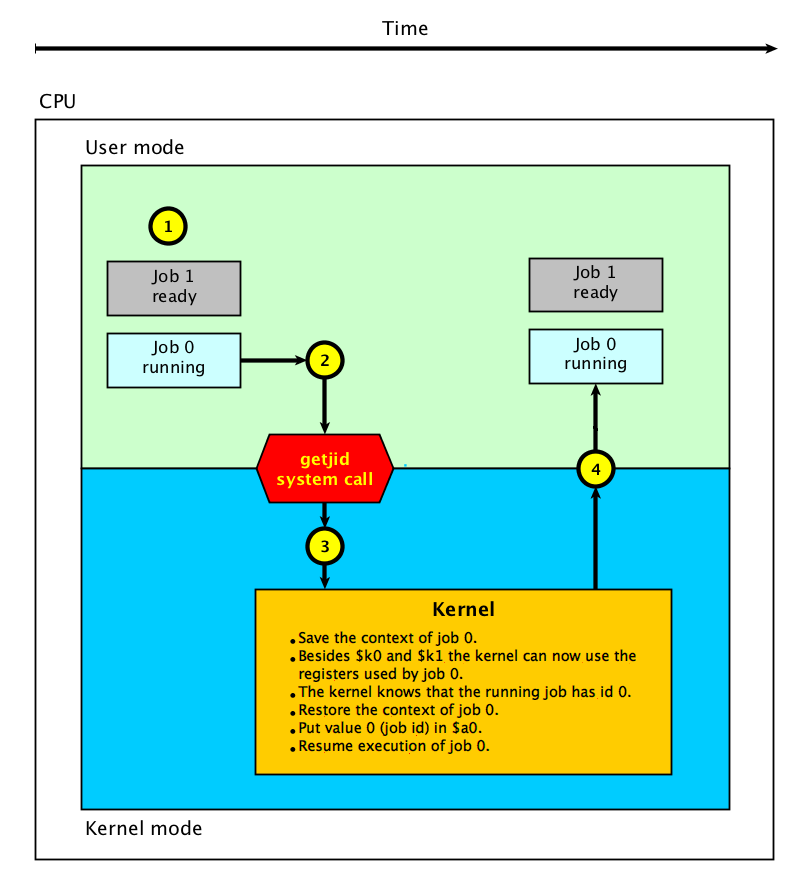
In the above figure important events are marked with a number inside a yellow circle.
- Job 1 is ready to run and job 0 is running.
- Job 0 uses a the custom
getcsystem call to read a character from the keyboard. - The system call uses a trap exception to enter the kernel.
- The kernel saves the context (all register values) of job 0.
- Besides
$k0an$k1the kernel can now safely use any of the registers saved to the job 1 context. - The kernel knows that the running job has id 0.
- The kernel restores the context of job 0.
- The kernel put the value 0 (the job id) in register
$a0.
- The kernel resumes execution of job 0.
Calling the custom getc system call
An example showing how to use the custom getc system call to read a character
from the keyboard.
li $v0, 12
teqi $zero, 0
# On succes $v0 will now contain the ASCII code of the pressed key. The below figure shows an example where job 1 calls the custom getc system
call and job 2 executes while job 1 waits for the user to press a key on
the keyboard.
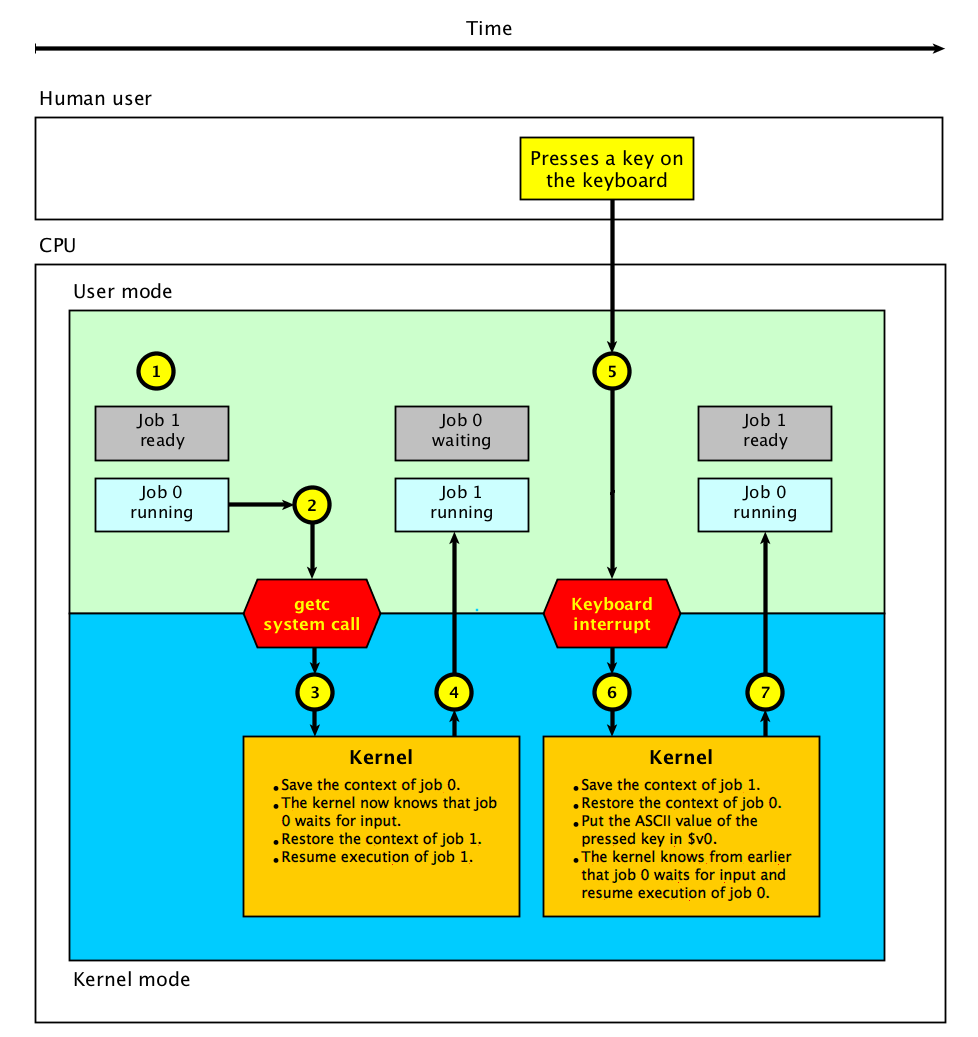
In the above figure important events are marked with a number inside a yellow circle.
- Job 1 is ready to run and job 0 is running.
- Job 0 uses the custom
getcsystem call to read a character from the keyboard. - The system call uses a trap exception to enter the kernel.
- The kernel saves the context (all register values) of job 0.
- The kernel now knows that job 0 waits for input and changes its state from running to waiting.
- The kernel restores the context of job 1.
- The kernel resumes execution of job 1 and changes its state from ready to running.
- The human user presses a key on the keyboard.
- The key-press causes a keyboard interrupt which is handled by the kernel.
- The kernel knows from earlier that job 0 waits for the
getcsystem call to complete. - The kernel saves the context of job 1 and changes its state from running to ready.
- The kernel restores the context of job 0 and changes its state from waiting to running.
- The ASCII value of the pressed key is placed in
$v0.
- The kernel knows from earlier that job 0 waits for the
- The kernel resumes execution of job 0 with the ASCII value of the pressed key
in
$v0.
Known bug in Mars
There is a conflict between the built-in system call 12 read_char and the
Keyboard and Display MMIO Simulator.
If the Keyboard and Display MMIO Simulator is open and connected, Mars
hangs if the user types a character on the simulated keyboard while Mars
waits for input using the built-in system call 12 read_char.
Clone repository
If you haven’t done so already, you must clone the fundamental-os-concepts repository.
Provided code
You don’t have to start from scratch but can use the provided
higher-grade/multiprogramming.s as a starting point.
Higher grade points (max 3)
For 1 point your system must have working implementations of the custom getjid and
getc system calls. Follow the labels TODO_1,
TODO_2, …, TODO_8 in the provided multiprogramming.s file to guide you
step by step.
For 3 points, in addition to the 1 point requirements above, your system must have a working implementation of the custom gets
system call. You must also provide a user level job with a few test cases
showing that gets works for different buffer sizes.